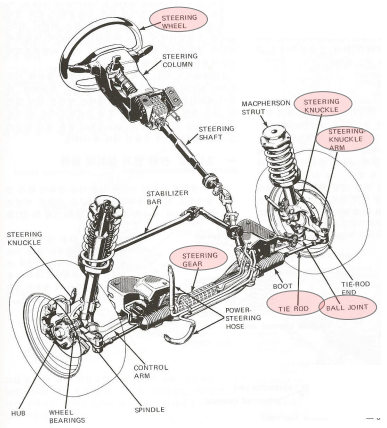
운전자가 차량의 주행 방향을 제어할 수 있게 해 준다. 스티어링 휠과 조향 축은 운전자의 조작을 조향 기어에 전달하고 조향 기어는 스티어링 휠의 회전 운동을 선형 운동으로 전환한다. 조향 링크 장치는 선형 운동을 조향 암으로 전달한다.
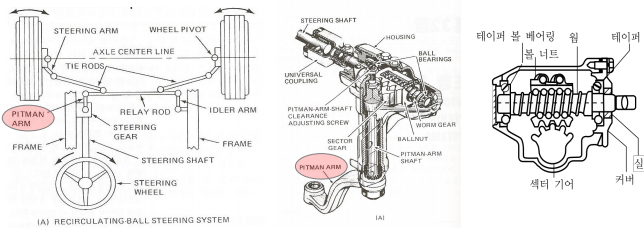
※ 재순환-볼 조향 기어 (Recirculating ball type)
웜 나사와 너트 사이에 여러 개의 볼을 넣어서 원의 회전력을 볼의 구름 접촉으로 너트에 전달시키는 구조로 되어 있다. 조향 축이 돌면 볼이 굴러서 나사 홈의 내부가 이동하여 너트 끝에서 바깥으로 나간 다음 안내 튜브를 지나 다시 나서 홈으로 되돌아 온다. 볼-너트(ball-nut) 식이라고도 한다. 핸들의 조작이 가볍고 큰 하중을 견디며 마모도 적어 많이 사용되는 형식이다. → 트럭과 대형차에서 주로 사용된다.
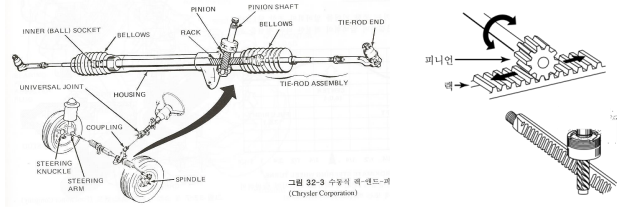
※ 랙 & 피니언 조향 기어 (rack and pinion)
랙 & 피니언식 조향기어는 조향 축의 끝에 피니언이 설치되고 여기에 랙이 물려 있는 형식이다. 이것은 핸들(또는 조향 축)의 회전운동을 랙을 통해 좌 우 직선 운동으로 바꾸어 조향하는 기구이다. 랙은 판 모양의 기어로서 양 끝에 타이로드가 붙어 있다. → 주로 승용차에 많이 사용한다.
※ 애커먼 조향 기구 (Ackerman Steering System)
애커먼 조향이란 좌 우 바퀴가 서로 다른 반지름의 원으로 경로를 따라갈 때 타이어가 옆으로 미끄러지는 것을 방지하기 위해 만들어졌다. 조향하는 좌 우 바퀴의 수직선이 뒷 바퀴의 중심선 위에서 만난다.
회전시 바퀴의 각은 너클암, 타이로드, 조향 기어등의 적절한 관계에 의해 이루어 진다.
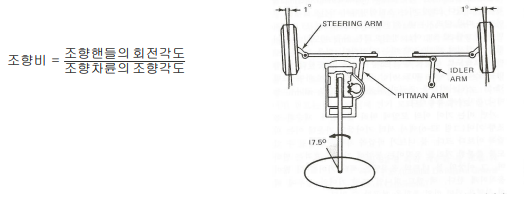
※ 조향비(steering ratio)
조향 바퀴가 1도 회정하는데 필요한 스티어링 휠의 회전 각도
조향비를 크게 하면 핸들 조작력은 작아지나 바퀴의 조향은 둔하게 된다. 조향비는 승용차가 약 10:1 ~ 25:1, 중형 상용차 16:1 ~ 30:1, 대형 상용차 25:1 ~ 40:1 정도이다. 이를 보면 상용차의 크기가 커질수록(대형 트럭) 무거워지게 되므로 조작력을 높이고 조향은 둔하게 설계하였다.
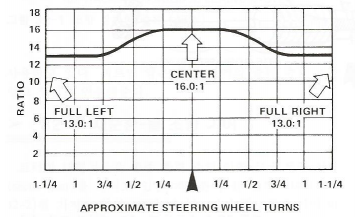
※ 가변 조향 비(Variable Ratio Steering)
가변 조향식은 자동차가 직진할 때는 기어비가 크게 만들어 바퀴의 조향을 둔하게 만들고, 주차와 같은 핸들을 많이 돌려야 할 때에는 기어비를 적게 만들어 바퀴의 조향을 높일 수 있도록 한다.
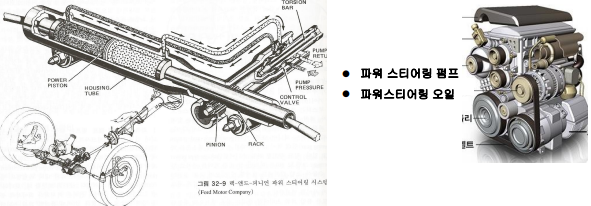
※ 파워 스티어링(Power Steering, 동력 조향 장치)
자동차는 핸들의 조작력을 가볍게 하고 신속한 조향 조작을 위해 동력조향장치(power steering system)를 사용한다. 엔진에 부착된 스티어링 오일 펌프로 부터 오일 압력을 조향장치 중간에 설치된 배력장치로 보내 핸들의 조작력을 가볍게 해주는 구조로 되어 있다.
파워 스티어링은 조작력을 작게 할 수 있으므로 조향 기어비를 자유롭게 선정할 수 있다. 또한 노면의 충격이 핸들에 전달되는 킥 백(kick back)을 방지할 수 있다.
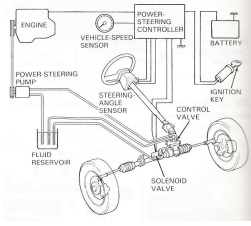
※ 속도 감응식 파워 스티어링
자동차의 속도가 증가함에 따라서 파워 스티어링의 조향각이 감소하고 타이어와 노면 사이의 접지 저항이 작아진다. 이에 따라 고속 주행시에는 조향 안정성이 떨어지게 되는데, 전자 제어 동력조향장치(EPS, electronic power steering system)는 전자 제어를 통해 자동차의 속도에 따라 동력 조향 장치에 공급되는 작동유의 유량을 조절하여, 속도가 증가하면 핸들을 무겁게 하고, 속도가 낮으면 가볍게 한다.
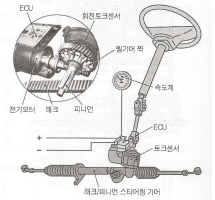
● 전기 모터식 파워 스티어링 (EPS, Electronic power steering system)
유압식 파워 스티어링에서 모터를 이용한 전자식 파워 스티어링으로 발전해 나가고 있다. 이와 같이 모터를 사용한 파워 스티어링을 MDPS(motor driven power steering) 이라고도 한다.
전기 모터식 파워 스티어링의 장점은 유압 펌프, 호스등의 유압 장치와 밀폐등이 필요하지 않고, 필요한 경우에만 출력을 소비하므로 연료 소비의 감소가 가능하다.
스티어링 휠의 토크와 방향 측정 → ECU → 가변 전류 → 전기모터 구동 → 조향력 발생